Математический метод извлечения терминалей аксонов ДА-ергических нейронов в области стриатума срезов головного мозга мышей
Предлагаемый метод предназначен для выделения множества мелких информативных протяженных объектов на изображениях фронтальных срезов стриатума и подсчета их характеристик. Результатом работы метода является двоичное изображение контуров выделенных объектов и список значений характеристик, подсчитанных для каждого выделенного объекта.
Разработанная алгоритмическая схема состоит из следующих этапов: (1) предобработка: (1.1) «открытие» изображения с помощью реконструкции, (1.2) преобразование «дно шляпы» с помощью двойственной реконструкции, (1.3) «закрытие» изображения с помощью двойственной реконструкции, (1.4) преобразование, устраняющее h-максимумы изображения; (2) анализ изображений: (2.1) выделение внутренних и внешних маркеров объектов, (2.2) преобразование морфологического градиента по найденным маркерам с помощью двойственной реконструкции, (2.3) выделение объектов с помощью алгоритма сегментации по водоразделам; (3) построение описания объектов, представленных на анализируемых изображениях: (3.1) построение признакового описания объектов (были использованы 25 морфометрических, денситометрических и текстурных признаков), (3.2) выбор признаков; (4) классификация: (4.1) кластеризация объектов, (4.2) интерпретация результатов.
Этапы предобработки и анализа изображений схемы основаны на следующих операциях математической морфологии: «открытие», тоновая реконструкция, «закрытие», преобразование «дно шляпы», морфологический градиент и преобразование водораздела. Применение этих шагов к исходным изображениям позволяет сгладить неоднородный сложный фон, выбрать маленькие объекты на изображениях, в зависимости от заданных размеров и величины тона, удалить несфокусированные объекты, разделить близко находящиеся объекты.
Ниже шаги метода описываются по следующей схеме: (1) роль данного преобразования при решении поставленной задачи; (2) иллюстративный материал, позволяющий оценить результат. Общие характеристики применяемых преобразований или алгоритмов, а также их математическое содержание и графики функций яркости пикселей представлены в работе.
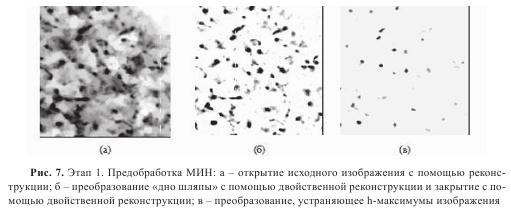
Этап 1. Предобработка изображений.
Все шаги первого этапа введены для того, чтобы избежать сегментации лишних объектов во время применения преобразования водораздела к изображению математического градиента.
Шаг 1.1. Открытие изображения с помощью реконструкции.
На шаге 1.1 метода на исходном изображении удаляются всплески яркости, соответствующие фону. В общем случае процедура открытия с помощью реконструкции используется для устранения узких всплесков яркости при сохранении среднего тонового фона и широких областей изменения яркости неизменными.
Понятия узости и широты зависят от используемого структурирующего элемента. Отличие данного преобразования от обычного открытия состоит в том, что дилатация изображения, подвергнутого эрозии, с тем же структурирующем элементом только частично восстанавливает значения яркости областей, которые не полностью сглажены эрозией, в то время как применение реконструкции позволяет избежать потери нужной информации. На рис. 7а представлены результаты выполнения данного преобразования.
Этот шаг необходим для того, чтобы сократить число фоновых областей, в которых достигаются локальные минимумы, в дальнейшем используемые в качестве маркеров объектов.
Шаг 1.2. Преобразование «дно шляпы» с помощью двойственной реконструкции.
Основной целью данного шага является сглаживание неоднородного сложного фона изображения.
Данное преобразование используется для удаления неоднородного сложного фона на изображениях объектов, значения яркости которых меньше значений яркости фона. Суть данного преобразования в том, что при правильном подборе структурирующего элемента (такого, что каждый объект целиком помещается в структурирующем элементе) закрытие с помощью двойственной реконструкции позволяет пометить узкие «углубления» яркости, при этом не помечая широкие, что дает хорошее приближение фона. После вычитания из закрытого изображения исходного фон получается более однородным. Применение двойственной реконструкции обусловлено необходимостью сохранять значения яркости внутри объектов, которые не полностью сглажены дилатацией.
При этом преобразовании внутренняя структура терминалей не изменяется. Достигается это за счет применения двойственной реконструкции и за счет того, что используемый структурирующий элемент вмещает в себя любую терминалы
Шаг 1.3. Закрытие изображения с помощью двойственной реконструкции.
Этот шаг метода предназначен для сглаживания неоднородных областей изменения яркости внутри терминалей. В общем случае процедура закрытия с помощью двойственной реконструкции используется для удаления узких углублений яркости при сохранении среднего полутонового фона и широких областей изменения яркости неизменными. Отличие данного преобразования от обычного закрытия состоит в том, что эрозия изображения, подвергнутого дилатации, по тому же структурирующему элементу только частично восстанавливает значения яркости областей, которые не полностью сглажены дилатацией. На рис. 7б представлены результаты выполнения шагов 1.2 и 1.3.
Данный шаг необходим для того, чтобы маркеры объектов как можно точнее соответствовали терминалям. В ином случае, так как в любой терминали изначально присутствует множество локальных минимумов яркости, процедура извлечения маркеров не давала бы желаемых результатов.
Шаг 1.4. Преобразование, устраняющее h-максимумы изображения.
Данный шаг соответствует исключению плохо сфокусированных объектов из рассмотрения. На срезе головного мозга, который имеет толщину 12 мкм, терминали располагаются слоями. При фотографировании среза только одна плоскость среза попадает в фокус микроскопа, поэтому одни терминали оказываются ярче других. Кроме того, возможно неравномерное прокрашивание терминалей, что также влечет различия в их яркости. Необходимо определить, какие объекты находятся ближе к фокусу, а какие — дальше.
Чем ближе к фокусу микроскопа находится объект, тем больше разность между максимальным и минимальным значениями яркости объекта. Так как в результате предыдущих преобразований максимумы яркости всех объектов выравниваются, то для определения степени близости к фокусу можно использовать минимумы яркости объектов, или, что то же самое, значения яркости региональных минимумов изображения. Для автоматизации процедуры сегментации объекты были разделены по яркости на два кластера. Начальные значения для центров кластеров полагались равными минимальному и максимальному значениям яркости изображения, полученного на предыдущем шаге. Результаты применения шага 1.4 представлены на рис. 7в.
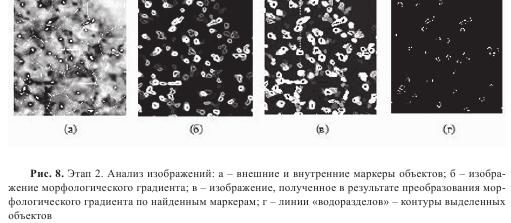
Этап 2. Анализ изображений.
На втором этапе применялся широко известный подход сегментации по водоразделам с использованием маркеров.
Шаг 2.1. Выделение внутренних и внешних маркеров объектов.
Применение алгоритма сегментации по водоразделам обычно приводит к избыточной сегментации, вызванной шумом или другими локальными неоднородностями на градиентном изображении. Подход, применяемый для управления избыточной сегментацией, основан на идее маркеров. Маркер представляет собой связную компоненту, принадлежащую изображению. Различают внутренние маркеры, относящиеся к объектам, и внешние маркеры, соответствующие фону изображения. Обычно внешние маркеры определяют таким образом, чтобы любой внешний маркер окружал ровно один внутренний маркер. Затем эти маркеры используются для преобразования градиентного изображения. В результате применения алгоритма сегментации по водоразделам к преобразованному градиентному изображению выделяются границы только тех объектов, которые были помечены внутренними маркерами.
Внутренние маркеры вычисляются как региональные минимумы изображения, полученного на предыдущем шаге. Внешние маркеры вычисляются с помощью изображения, полученного преобразованием расстояния из двоичного изображения внутренних маркеров. При данном преобразовании каждой точке изображения присваивается значение, равное расстоянию до ближайшего не-фонового пиксела. Затем к полученному изображению применяется процедура сегментации по водоразделам. Получается, что линиям водоразделов соответствуют пикселы, находящиеся на максимальном удалении от ближайших внутренних маркеров. Внутренние и внешние маркеры изображены на рис. 8а.
Шаг 2.2. Преобразование морфологического градиента по найденным маркерам.
Морфологический градиент, представленный на рис. 8б, получается вычитанием из изображения, полученного после шага «закрытие изображения с помощью двойственной реконструкции» и подвергнутого дилатации того же изображения, подвергнутого эрозии. На рис. 8в представлено преобразование градиента по найденным маркерам.
Шаг 2.3. Выделение объектов с помощью алгоритма сегментации по водоразделам.
Понятие «водораздела» основано на представлении изображения в виде трехмерной поверхности. В такой «топографической» интерпретации рассматриваются точки трех видов: (1) точки локального минимума; (2) точки, находящиеся на склоне, т.е. те точки, с которых вода скатывается в один и тот же локальный минимум; (3) точки, находящиеся на гребне или пике, т.е. те точки, с которых вода с равной вероятностью скатывается более чем в один локальный минимум.
Применительно к конкретному локальному минимуму, набор точек, удовлетворяющих условию 2, называется «бассейном» (или «водосбором») этого минимума. Множества точек, удовлетворяющих условию 3, образуют линии гребней на поверхности рельефа и называются «линиями водоразделов».
На практике метод сегментации по водоразделам чаще всего применяется к градиенту изображения. В этом случае локальные минимумы бассейнов хорошо согласуются с малыми значениями градиента, что обычно соответствует объектам, тогда как линии водоразделов, соответствующие пикселам изображения градиента с большими значениями, приближают границу объектов. Далее к преобразованному градиенту применяется процедура сегментации по водоразделам, в результате чего получаются границы объектов. На рис. 8г изображены линии «водоразделов».
На этапе 3 были выбраны информативные признаки для описания объектов. Интерпретация этих признаков экспертами может открыть новые принципы построения модели БП.
На этапе 4 объекты были разделены на несколько групп. Характеристики получившихся кластеров были переданы экспертам-биологам для дальнейшего детального анализа.
Разработанный метод программно реализован и экспериментально исследован в ФГБУН «Институт биологии развития им. Н.К. Кольцова Российской академии наук» для автоматизации наполнения и исследования моделей БП экспериментальными данными. Большинство алгоритмов, реализующих разработанный метод, имеют полиномиальную сложность, что доказывает их эффективность. Стоит также отметить, что алгоритмы, реализующие операции математической морфологии, допускают эффективное распараллеливание.
Точность полученных результатов оценивается путем проверки гипотез о совпадении распределений (нулевая гипотеза) характеристик терминалей при автоматическом выделении и при выделении вручную по критерию Колмогорова-Смирнова (усредненные значения характеристик объектов, выделенных автоматически и вручную, приведены в табл. 1).

Для сравнения результатов автоматического и ручного выделения терминалей случайно выбранные прямоугольные фрагменты исходных изображений были обработаны экспертами в области БП и с помощью предложенного метода. Таким образом, точность разработанного метода является не меньшей при ручном выделении объектов. По оценке экспертов, доля объектов, выделенных правильно при автоматической обработке, составила 93%.
Исходное изображение с помеченными на нем границами терминалей, выделенных с помощью разработанного метода, представлено на рис. 9а. На рис. 9б приведено то же изображение, но с контурами объектов, выделенных вручную.

Программная реализация метода выделения терминалей обеспечивает следующие возможности: (1) автоматическую сегментацию всех исследуемых объектов на изображении среза; (2) определение морфологических характеристик помеченных объектов (диаметр, площадь, фактор формы (степень округлости)); (3) определение денситометрических характеристик помеченных объектов (определение оптической плотности терминалей); (4) сохранение всех результатов работы в базе данных; (5) возможность обработки изображений, разделенных на задаваемые группы; (6) автоматическая группировка исходных изображений различными способами (по всем парам экспериментальных животных, по различным областям мозга (дорсальной и вентральной), по направлению срезов (ростро-каудальному)); (7) получение статистических характеристик вычисленных оценок (математическое ожидание, среднеквадратическое отклонение, стандартная ошибка) и проверка гипотез о достоверности различий опытной и контрольной групп на заданном наборе изображений (Т-критерий Стьюдента: статистика, достигаемый уровень значимости, принятая гипотеза).
Применение разработанного ПО позволяет существенно ускорить исследование моделей БП. По оценкам самих экспертов — приблизительно в 200 раз.
Результаты экспериментов показали: (1) существенное уменьшение количества терминалей ДА-ергических аксонов в опыте по сравнению с количеством терминалей в контроле; (2) изменение функциональной активности ДА-ергических терминалей по оптической плотности, которая коррелирует с содержанием тирозингидроксилазы, после воздействия нейротоксина.
С помощью разработанного метода были также проанализированы полученные после воздействия нейротоксина срезы аркуатного ядра гипоталамуса мышей, содержащие ДА-ергические терминали. В результате обработки 2000 изображений впервые получены данные о воздействии нейротоксина на тубероинфундибулярную систему мозга мышей, позволяющие оценить функциональное состояние этой системы.
Читайте также
Услуги гидроизоляции — внешняя или внутренняя?

Трудовые споры: как добиться справедливости от недобросовестного работодателя

Трудовые отношения — это тонкая материя, полная нюансов и правовых
Как отличить брендовые очки от подделки

Брендовые солнцезащитные очки — это не только модный аксессуар, но
Дизайн встроенной кухни: как оптимизировать пространство

Несмотря на большое разнообразие готовой (типовой) мебели, мебель на заказ
Михаил Владимирович Мишустин: отличный управленец и экономист

Михаил Владимирович Мишустин — выдающийся российский государственный и политический деятель,
Самые популярные рецепты пиццы: идеальное сочетание ингредиентов для настоящего гурмана

Пицца – это одно из наиболее популярных блюд в мире,
-

Лето – это время, когда дети, закончив учебный год, уходят
Как получить гражданство Бельгии и что оно дает?

Бельгия, расположенная в сердце Европейского союза, по праву считается одним
Осетинские пироги: вкусное и популярное блюдо с Кавказа

Когда начинать готовиться к ЕГЭ и ОГЭ 2024: полезные рекомендации

Начало нового учебного года часто становится временем повышенной тревожности как
На чем можно долететь до Мальдив? Регулярный рейс или аренда частного самолета?

Путешествие на Мальдивы — это мечта многих туристов. Острова, утопающие
Зубной имплантат: преимущества выбора при протезировании

Зубной имплантат – это современная технология, предоставляющая возможность восстановить утраченный
Яйцо шоколадное Kinder сюрприз: волшебство, которое завоевало сердца детей и взрослых

Яйцо Kinder сюрприз, безусловно, является одним из наиболее популярных шоколадных
Суши и пицца: почему они так популярны в службе доставки

Службы доставки еды становятся всё популярнее среди людей, желающих насладиться
Пептидные препараты: сущность и области применения

Пептидные препараты стали одним из важнейших направлений в современной медицине