Биомеханические параметры циклических движений корпуса у пациентов с болезнью Паркинсона и эссенциальным тремором
Была предпринята попытка исследовать кинематические особенности трехмерных движений корпуса у пациентов на начальных стадиях БП и у больных с ЭТ. В работе кроме движения в сагиттальной плоскости рассматривались движения во фронтальной и горизонтальной плоскостях. Кроме того, помимо голеностопного и тазобедренного сустава исследовалась подвижность грудного сегмента корпуса относительно тазового. Это потребовало создания трехмерной модели движений корпуса, учитывающей все степени свободы, имеющиеся в указанных суставах.
В исследовании приняли участие три группы испытуемых. Во-первых, группа пациентов с БП. Стадия БП оценивалась по шкале Хен-Яра в модификации О. Линдвала. Среди 36 пациентов 27 пациентов имели заболевание в стадии 1, 8 пациентов в стадии 2 и только один пациент в стадии 3. Во-вторых, 14 пациентов с ЭТ. Тремор оценивался с использованием шкалы Фана-Толоса-Мартина. Средняя оценка тремора по группе составляла 7,38±0,83. Наконец, в исследовании участвовали 23 практически здоровых испытуемых без известных неврологических и ортопедических отклонений, которых мы рассматривали как контрольную группу (КГ). Исследование проводилось в соответствии с Хельсинкской декларацией при информированном согласии испытуемого.
Экспериментальная установка включала в себя электромагнитную систему регистрации движений и управляющий компьютер. Система регистрации движений Flock of Birds («Ascension Technology Corporation», USA) позволяла измерять пространственное положение датчиков с точностью ±0,5мм и их ориентацию с точностью ±0,1 град. Общая частота оцифровки показаний системы регистрации движения и стабилоанализатора составляла 67 Гц. Четыре датчика движения были закреплены на бедрах, тазе и на грудном отделе спины испытуемого.
Каждому испытуемому предлагалось выполнить шесть двигательных задач в положении стоя. Исследованию движений в каждой из трех анатомических плоскостей — сагиттальной, фронтальной и горизонтальной — было посвящено по две задачи. В сагиттальной плоскости испытуемые выполняли покачивание всем корпусом вперед-назад за счет сгибания-разгибания голеностопного сустава (задача sA, s — сагиттальная плоскость, А — голеностопный сустав) и наклоны вперед и назад за счет сгибания-разгибания в тазобедренном суставе (задача sH, s — сагиттальная плоскость, Н — тазобедренный сустав). Движения, совершаемые во фронтальной плоскости, включали покачивания всем корпусом в стороны за счет подвижности голеностопного сустава (для выполнения этого движения вес тела переносили попеременно с одной стопы на другую — задача fA, f — фронтальная плоскость, А -голеностопный сустав) и наклоны в стороны за счет подвижности тазобедренного сустава вокруг сагиттальной оси (задача fH, f — фронтальная плоскость, Н — тазобедренный сустав). Наконец, в горизонтальной плоскости испытуемые выполняли вращение всего корпуса вокруг вертикальной оси тела за счет голеностопного сустава (на самом деле происходило вращение всех сегментов тела в одну сторону вокруг вертикальной оси — задача hA, h — горизонтальная плоскость, А — голеностопный сустав) и вращение таза вокруг вертикальной оси при неподвижных плечах (задача hH, h — горизонтальная плоскость, Н — тазовый сегмент).
Все испытуемые выполняли шесть предложенных задач в фиксированной последовательности: sA, sH, fA, fH, hA, hH. Каждое движение выполнялось циклически по 5 раз в комфортном темпе, выбранном самим испытуемым. Перед началом эксперимента испытуемому давали устную инструкцию, сопровождаемую показом движений. Испытуемого просили сложить руки на груди, не сгибать колени и не отрывать стопы от платформы. В перерывах между задачами испытуемому напоминали очередную задачу. Момент начала движения выбирался самим испытуемым. Типичный эксперимент продолжался приблизительно 20 мин.
Переход от первичных данных о положении и ориентации датчиков к описанию трехмерного движения корпуса в терминах суставных углов проводился по методу, предложенному в работе. Далее суставные углы в левом и правом голеностопном и тазобедренном суставах усреднялись. Таким образом, движение в каждом из трех суставов — объединенном голеностопном (А), объединенном тазобедренном (Н) суставах и в эквивалентном торсовом псевдосуставе между плечевым и тазовым сегментами (Т) — описывалось изменением трех углов: сгибанием относительно поперечной оси, сгибанием относительно сагиттальной оси и вращением вокруг вертикальной оси, всего девять обобщенных координат.
Для каждой двигательной задачи были выбраны характерные обобщенные координаты, в наибольшей степени отражавшие специфику данного движения. Так, для наклонов в сагиттальной плоскости анализировался угол поворота вокруг поперечной оси, перпендикулярной сагиттальной плоскости. Для наклонов во фронтальной плоскости был выбран угол вращения вокруг сагиттальной оси. Для вращения корпуса и тазового сегмента относительно вертикальной оси анализировались углы вращения в горизонтальной плоскости. Таким образом, выполнение каждой двигательной задачи характеризовалось тремя переменными — характерными углами в трех модельных суставах. В дальнейшем для обозначения каждого из выходных параметров будет использоваться комбинация из обозначения сустава, за которым в скобках следует обозначение двигательной задачи. Например, обозначение A(sA) используется для обозначения амплитуды угла в голеностопном суставе (А) при выполнении наклонов в сагиттальной плоскости (s) при ведущем голеностопном суставе (sA).
Зависимости выбранных углов от времени имели форму, близкую к синусоидальной. В частотном представлении этому соответствовал изолированный узкий и хорошо различимый пик на частоте основной гармоники. Квазигармонический характер временных зависимостей позволил исследовать их с помощью частотно-фазового Фурье-анализа и получить интегральные характеристики выполнения каждой задачи: частоту, амплитуду и разность фаз для соседних суставов. Частота и амплитуда каждого движения соответствовали положению и величине максимума автоспектра для характерных углов в каждом из трех суставов (от 1 до 3). Для каждой из задач частоты основной гармоники для всех суставов практически совпадали. В качестве частоты движения принималось среднее значение по трем углам. Разность фаз между движениями в k-ом и m-ом суставах вычислялась как фаза взаимного спектра для изменения характерных суставных углов на частоте основной гармоники.
Частота основной гармоники движений. Средние значения частот для каждой из двигательных задач представлены в табл. 2. Оказалось что частота основной гармоники значимо выше у пациентов, чем у испытуемых КГ, причем у пациентов с БП выше, чем у пациентов с ЭТ (см. табл. 2). На первый взгляд, это противоречит отмеченному в литературе наличию брадикинезии у пациентов с БП. Так, у пациентов на поздних стадиях БП при сагиттальном наклоне (вперед или назад) амплитуда движений меньше, а время выполнения движений больше, чем у контрольных испытуемых. На самом деле здесь нет противоречия. Во-первых, в настоящей работе фаза инициации движения не регистрировалась и ее длительность не учитывалась при оценке времени движения. Между тем, как показано в исследовании инициации ходьбы, при БП именно фаза инициации, т.е. время от предъявления императивного сигнала до начала первого шага, оказывается длительнее, чем в норме, а время выполнения шага не отличается от нормы. Во-вторых, в настоящей работе все движения предлагалось выполнять в удобном темпе, в то время как различия в скорости движения у пациентов с БП и у здоровых испытуемых обычно наблюдаются тогда, когда движение предлагалось выполнить как можно быстрее. Наконец, брадикинезия проявляется в первую очередь в медленной ходьбе, а частота шагов положительно коррелирует со скоростью перемещения только при условии неизменной длины шага, в то время как у пациентов с БП длина шага укорочена, частота шагов, напротив, увеличена.

Исследование походки у пациентов с ЭТ и у пациентов с мозжечковыми нарушениями показало, что как у пациентов с ЭТ, так и у мозжечковых больных существенно пролонгирована фаза опоры, когда обе ноги соприкасаются с опорой, и укорочена фаза переноса, при сохранении общей длительности шага. В то время как у мозжечковых больных этот эффект выражен и при обычной локомоции, и в тандемном шаге, у пациентов с ЭТ эффект становится заметен только в тандемном шаге. Увеличение частоты циклических наклонов у пациентов, показанное в настоящей работе, также соответствует более кратковременным единичным движениям, где торможение быстрее следует за ускорением. Однако сравнивать с ходьбой наклоны корпуса, выполняемые без отрыва стопы от опоры, можно только с известной осторожностью. Вопрос частоты выполнения произвольных движений у пациентов с БП и ЭТ требует отдельного исследования.
Амплитуды суставных углов. Линейный дискриминантный анализ. Рассматривая амплитуды суставных углов как вектор в многомерном пространстве, мы использовали линейный дискриминантный анализ, основанный на методе линейной регрессии. Надежность классификации оценивалась при помощи коэффициента aе Коэна, который вычисляется при помощи так называемой матрицы ошибок Р, каждый элемент которой рij — это вероятность классификации события категории i как события категории j. Тогда
![]()
При идеальном классификаторе матрица Р должна быть диагональной, т.е. ненулевые элементы должны стоять только на главной диагонали. Тогда aе =1. В случае совершенно случайной классификации aе оказывается близкой к нулю.
Мы оценивали точность классификации как функцию числа параметров, включенных в дискриминантный анализ, причем для каждого числа параметров перебирались все сочетания амплитуд суставных углов и в качестве искомой точности классификации выбиралось максимальное значение aе.
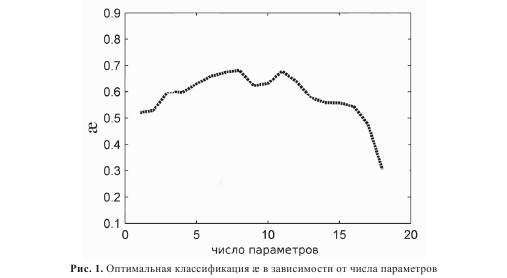
Каждый частный дискриминантный анализ для определенного набора исходных параметров проводился следующим образом: выборку разделяли на обучающую и тестирующую подвыборки в соотношении 0,7 и 0,3 от полной выборки, соответственно. В этом случае показатель aе оценивался как среднее, полученное по 200 случайным комбинациям обучающей и тестирующей выборок. Комбинация параметров, соответствующая максимальному значению aе, выбиралась в качестве оптимальной для данного числа параметров. На рис. 1 показана кривая оптимальной классификации aе в зависимости от числа параметров. Из рисунка видно, что максимальное значение aе, равное 0,68 достигается для 8 параметров. Классификация данных на 3 группы является двумерной задачей и выражается двумя скалярными дискриминантными функциями DF1 и DF2, состоящими из 8 наилучших классификаторов — амплитуд изменения суставных углов.

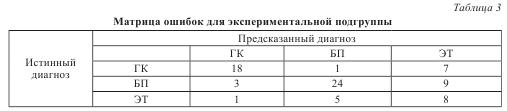
На рис. 2 показана скаттерграмма участников исследования в координатах дискриминантной функции. Каждый светлый квадрат соответствует испытуемому КГ, темный треугольник — пациенту с БП, а темный кружок — пациенту с ЭТ. Из рисунка видно, что участники демонстрируют тенденцию группироваться в соответствии со своим диагнозом. Пациенты с БП собираются в третьем квадранте (DF1≤0 и DF2≤0), Здоровые испытуемые в основном попадают в четвертый квадрант (DF1≥0 и DF2≤0), а пациенты с ЭТ занимают в основном верхнюю полуплоскость (DF2≥0). Таким образом, можно рассматривать значение DF1≤0 как предиктор БР, а значения DF2≥0 как предиктор ЭТ. В табл. 3 представлена матрица ошибок для исследуемой экспериментальной подгруппы. Видно, что для ГК и для БП число правильно предсказанных диагнозов существенно превышает ошибочно предсказанные диагнозы. Среди 14 пациентов с ЭТ 8, т.е. большая часть, также была классифицирована правильно. Однако для ЭТ это соотношение не столь надежно, к тому же у 16 испытуемых ЭТ предсказано ошибочно. Возможно, это связано с малым числом участников с ЭТ.

Рассмотрение структуры декриминантной функции показывает, что в первом компоненте DF1 положительный коэффициент с максимальным абсолютным значением стоит при параметре A(sH). Это значит, что пациенты с БП совершают отклонения в голеностопном суставе в сагиттальной плоскости меньше, чем здоровые испытуемые. Коэффициент с наибольшим отрицательным весом стоит при T(sH) — амплитуда отклонения в торсовом псевдосуставе в сагиттальной плоскости. Эта величина у пациентов с БП оказывается больше, чем у испытуемых КГ. Таким образом, как и в работе А.В. Александрова с соавторами, в настоящей работе амплитуда изменений суставных углов в голеностопном суставе в сагиттальной плоскости оказалась ниже у больных с БП, чем у здоровых испытуемых. Кроме этих различий, согласующихся с результатами, полученными ранее, дискриминантный анализ позволил выявить новый эффект: амплитуда сгибания торсового псевдосустава в сагиттальной плоскости оказалась больше у паркинсоников в том случае, когда инструкция требовала выполнять покачивания всем корпусом за счет голеностопного сустава, а не за счет тазобедренного или торсового суставов. Вхождение этой амплитуды в оптимальную дискриминантную функцию с наибольшим положительным весом дает основание говорить о тенденции пациентов с БП сгибать торс вместо голеностопного сустава. Большая амплитуда сгибания в торсе, по-видимому, носит компенсаторный характер: при сниженной подвижности в тазобедренном и голеностопном суставах дополнительное сгибание торса помогает достичь соответствующего угла наклона головы к горизонту, субъективно воспринимаемого как наклон. Таким образом, мы имеем компенсацию недостаточной подвижности в тазобедренных и голеностопных суставах за счет подвижности торса, еще сохраняющейся на этой стадии заболевания. С прогрессированием заболевания такой способ компенсации становится недоступным для пациентов, так как ригидность мышц корпуса увеличивается и корпус начинает двигаться как жесткий сегмент.
Вторым по абсолютной величине положительным коэффициентом является коэффициент при A(hH), т.е. при амплитуде угла аксиального вращения тазового сегмента ГТ. Средние значения данной амплитуды у пациентов с БП так же ниже, чем в КГ. При выполнении вращения таза при неподвижных плечах и стопах существенная часть пациентов с БП и два пациента с ЭТ не справлялись с координацией движения суставов. При вращении тазового сегмента голеностопный и тазобедренный суставы должны поворачиваться строго синфазно, или с разностью фаз 0°, а эффективный торсовый пседосустав поворачивается в противофазе, что соответствует разности фаз в 180°. Таким образом, плечевой сегмент не смещается относительно стоп. Подобное соотношение фаз характерно также для многих пациентов с БП. Однако у значительной части пациентов с БП это соотношение не выдерживается. Как видно из рис. 2, разность фаз между тазобедренным суставом и эквивалентным торсовым псевдосуставом принимает все значения от 0 до 180. Нулевая разность фаз соответствует синфазному вращению в тазобедренном суставе и торсовом псевдосуставе и не может обеспечить правильного выполнения движения, т.е. вращения тазового сегмента при неподвижных плечах. Нарушение координации движений таза и плеч в этом случае нельзя объяснить ригидностью, так как ригидность сама по себе привела бы, как и в случае вращения всего корпуса, к правильному выполнению задачи, но с меньшей амплитудой. Нарушение координации может быть результатом дефицита проприоцептивно-моторной интеграции, которая наблюдается при БП. Пытаясь скомпенсировать недостаток проприоцептивной чувствительности, пациенты используют зрительную обратную связь и успешнее выполняют задачи, в которых предъявляется видимая цель и возможно использование зрительно-моторной координации. Полученные в настоящей работе данные позволяют предположить, что пациенты могут компенсаторно привлекать зрительную обратную связь как при наклоне вперед, так и при скручивании, когда именно перемещение головы, а значит и видимой картинки, служило сигналом об успешном выполнении задачи. Нарушение координации происходит в тех случаях, когда зрительная обратная связь неэффективна и необходимо использовать именно проприоцептивный сигнал. Этим, по-видимому, объясняется наблюдаемое в настоящей работе нарушение координации движений плечевого и тазового сегментов во время вращения таза вокруг вертикальной оси при неподвижных плечах. Характер представленных дефектов аксиальных движений и тот факт, что дофаминсодержащие препараты их не компенсируют (исследование проводилось через час-полтора после приема препарата, т.е. в оптимальном состоянии), позволяет предположить, что нарушения функционирования дофаминергических систем в базальных ганглиях не являются непосредственной причиной нестабильности баланса и дефицита проприоцептивно-моторной интеграции при БП. Возможно, причиной этих нарушений являются вторичные поражения SMA. Показано, что а) в норме эта область вовлекается в переработку проприоцептивной информации, так как ее активность возрастает при выполнении движений под проприоцептивным контролем; б) эта область получает обильные связи из дофаминергических областей; в) при БП и при поражениях SMA наблюдаются сходные моторные нарушения, что проявляется в выполнении бимануальных двигательных последовательностей; г) ее активность усиливается приемом дофаминсодержащих препаратов у тех пациентов, у которых она снижена. Показано, что с развитием БП в управление движениями вовлекаются области мозга, в норме отвечающие за другую, часто более сложную деятельность. Так, при снижении активности дополнительной моторной области управление движениями может компенсаторно переключаться на использование сохранной дорсолатеральной премоторной коры, которая, однако, требует внешних сенсорных сигналов, в частности зрительных.
Второй компонент дискриминантной функции DF2 демонстрирует более высокие значения для пациентов с ЭТ. Наибольший положительный коэффициент стоит при параметре T(fA) — амплитуде угла в торсовом псевдосуставе во фронтальной плоскости. Отклонение в сторону в торсе у пациентов с ЭТ больше, чем у пациентов с БП и КГ. Причем в задаче fA отклонения торса как раз не требовалось, так что речь идет скорее о неконтролируемых движениях. Поскольку, как уже отмечалось выше, у пациентов с ЭТ патологические изменения наблюдаются в мозжечке, мы относим это ухудшение контроля за счет мозжечкового дефицита и рассматриваем повышенную неконтролируемую подвижность торса как знак гиперметрии, поскольку клинические исследования показывают, что гиперметрия часто оказывается следствием поражения мозжечка.
Среди пациентов с ЭТ особо обращают на себя внимание два пациента, которые не смогли выполнить изолированное вращение тазового сегмента и скоординировать вращение сегментов в противофазе (см. рис. 2). Мы видим два предположительных объяснения этому наблюдению. Во-первых, мозжечковая дисфункция может препятствовать успешной координации движений во времени, в данном случае противофазной синхронизации. Известно, что мозжечок отвечает за тонкий временной мониторинг центральных сигналов, который может регулировать движение как одного, так и нескольких суставов. Альтернативным объяснением трудностей с противофазной координацией у двух пациентов с ЭТ может быть дебют у этих пациентов БП, маскированный симптомами ЭТ. В исследовании было показано, что лица с ЭТ имеют в 24 раза более высокую вероятность развития БП, чем в среднем по популяции.
Читайте также
Услуги гидроизоляции — внешняя или внутренняя?

Трудовые споры: как добиться справедливости от недобросовестного работодателя

Трудовые отношения — это тонкая материя, полная нюансов и правовых
Как отличить брендовые очки от подделки

Брендовые солнцезащитные очки — это не только модный аксессуар, но
Дизайн встроенной кухни: как оптимизировать пространство

Несмотря на большое разнообразие готовой (типовой) мебели, мебель на заказ
Михаил Владимирович Мишустин: отличный управленец и экономист

Михаил Владимирович Мишустин — выдающийся российский государственный и политический деятель,
Самые популярные рецепты пиццы: идеальное сочетание ингредиентов для настоящего гурмана

Пицца – это одно из наиболее популярных блюд в мире,
-

Лето – это время, когда дети, закончив учебный год, уходят
Как получить гражданство Бельгии и что оно дает?

Бельгия, расположенная в сердце Европейского союза, по праву считается одним
Осетинские пироги: вкусное и популярное блюдо с Кавказа

Когда начинать готовиться к ЕГЭ и ОГЭ 2024: полезные рекомендации

Начало нового учебного года часто становится временем повышенной тревожности как
На чем можно долететь до Мальдив? Регулярный рейс или аренда частного самолета?

Путешествие на Мальдивы — это мечта многих туристов. Острова, утопающие
Зубной имплантат: преимущества выбора при протезировании

Зубной имплантат – это современная технология, предоставляющая возможность восстановить утраченный
Яйцо шоколадное Kinder сюрприз: волшебство, которое завоевало сердца детей и взрослых

Яйцо Kinder сюрприз, безусловно, является одним из наиболее популярных шоколадных
Суши и пицца: почему они так популярны в службе доставки

Службы доставки еды становятся всё популярнее среди людей, желающих насладиться
Пептидные препараты: сущность и области применения

Пептидные препараты стали одним из важнейших направлений в современной медицине